Propriedades de um Sistema de Controle Ativo de Ruído
Embora seja muito comum pensarmos que um sistema de controle ativo mascara o ruído, este năo é o objetivo de um sistema de controle ativo. O objetivo deste sistema é a total eliminaçăo do ruído.
O princípio deste tipo de sistema de controle săo dois fenômenos físicos: interferęncia destrutiva e acoplamento de impedância.
O primeiro princípio consiste em emitir uma onda "imagem" do sinal do ruído, onde, os vales e os picos se anulariam; o problema deste princípio é que o mesmo exige a acoplamento entre as duas ondas no tempo e no espaço. O princípio do acoplamento de impedâncias é modificar a impedância de entrada do sistema.
Tipos de sistema
Temos dois tipos de sistema de controle de ruído:
- Sistemas em que se pode medir o ruído antes que o mesmo chegue ao meio a ser controlado - chamado de agora em diante, feedfoward control; este tipo de sistema trata as informaçőes antes que o ruído chegue ao meio e envia o sinal de controle para o atuador;
- Sistema em que năo se pode medir o ruído antecipamente - denominados feedback control. O sinal de controle do atuador neste sistema é computado somente através dos erros medidos pelos sensores. Este tipo de sistema é menos estável do que o primeiro tipo de sistema.
Feedback control
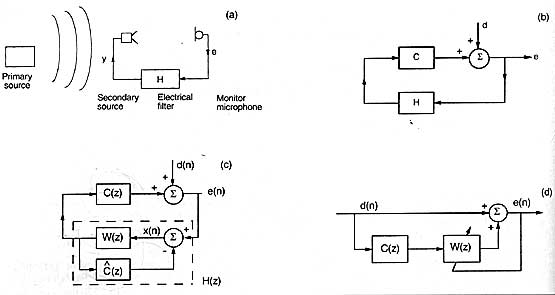
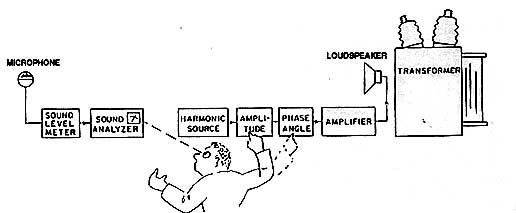
Nesta figura, "e" representa o sinal derivado do microfone, devido ŕ fonte ( sinal d )
e ao loop de feedback.
A funçăo de transferęncia entre a saída do alto falante e a entrada do microfone, C,
é chamada de caminho secundário ou de erro.
A funçăo de transferęncia do loop, H, é uma simples inversăo de ganho e fase.
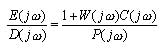
A funçăo de transferęncia entre o distúrbio e o erro medido é:
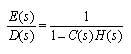
C(jw) năo deve ter um deslocamento de fase, pois senăo o som produzido năo anula o ruído
emitido pela fonte primária, pelo contrário, aumenta-o cada vez mais. Sendo assim, podemos
concluir que este sistema é um sistema instável.
Infelizmente devido a propriedades eletromecânicas do auto-falante C(jw) nunca
será perfeitamente plana e sem deslocamento de fase.
Para compensar este tipo de problema, pode-se usar filtros compensadores, embora estes possuam um inconveniente de trabalhar com uma única freqüęncia e como a freqüęncia do ruído pode modificar ao longo do tempo, o filtro utilizado năo corrigirá mais o sinal. Uma soluçăo para este inconveniente é a implementaçăo de filtros adaptativos digitais. Se o controlador é digital, ele trabalha com dados amostrados, fazendo o correto tratamento do sinal de erro, veja o diagrama de blocos (c) da Fig.2. Agora assumimos que o controlador é composto por um caminho de "feedback W(z)" e "feedfoward C^(z)", veja diagrama de blocos (c) da Fig. 2 acima.
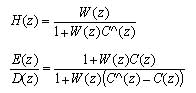
Se a parte do feedfoward do controlador é adaptada para ter a mesma funçăo de transferęncia do sistema controlado, entăo:
Estes sistemas săo muito usados no controle de ruído propagando em dutos, neste caso o microfone é colocado adjacente ao auto-falante. Embora os produtos de maior sucesso e venda seja fones de ouvido e protetores de ouvido; os produtos comercial disponíveis apresentam uma média de 10 a 15 dB de reduçăo para uma freqüęncia de ruído de 30 a 500 Hz.
Feedfoward control
Este sistema pode ser representado pelo diagrama de blocos abaixo:
A diferença entre o sistema feedback e este tipo de sistema consiste em que este sistema tem um sinal de referęncia, x no diagrama de blocos acima. Este sinal é utilizado para controlar a fonte secundária, via controlador elétrico W. Este sinal deve ser bem correlacionado com o sinal da fonte primária, para o correto tratamento do sinal.
Em um sistema para o controle de ruído com grande faixa de freqüęncia este sinal, de referęncia, prove informaçőes sobre o sinal de ruído antes mesmo que o sinal chegue ao sensor (microfone); possibilitando assim o controlador efetuar o cancelamento do ruído com maior eficięncia.
O sistema mostrado acima possui a seguinte funçăo de transferęncia entre o sinal de erro e o ruído emitido.
A resposta em freqüęncia ideal do controlador seria:

Pois assim a funçăo de transferęncia entre o sinal de erro e de ruído seria igual a 0(zero),
conseqüentemente teríamos um total cancelamento do ruído.
Num sistema prático, o caminho secundário (caminho entre o auto-falante e o microfone)
varia ao longo do tempo, por isso o controlador mais comumente utilizado neste tipo de
sistema é o adaptativo. O método mais conveniente de implementar um filtro adaptativo
neste tipo de sistema é através de técnicas de processamento digital de sinal.